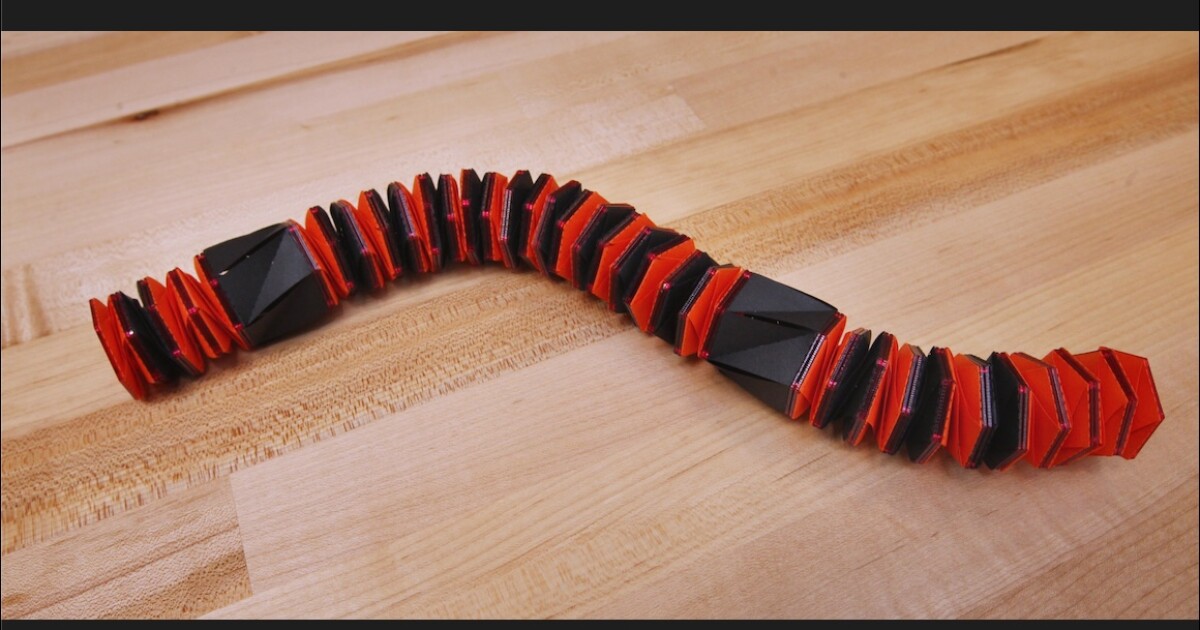
Si un robot de cuerpo blando utiliza actuadores rígidos para mover su cuerpo, entonces ya no es realmente blando, ¿verdad? Un nuevo robot experimental inspirado en una oruga soluciona ese enigma utilizando segmentos de origami suaves y plegables para retorcerse y abrirse camino hacia nuestros corazones.
Conocido como Robotopilar, el dispositivo fue creado mediante una colaboración entre ingenieros de las universidades estatales de Princeton y Carolina del Norte.
Como ocurre con otros similares robots serpentinos Como hemos visto recientemente, él (o sus descendientes) algún día podría encontrar uso en aplicaciones como la búsqueda de supervivientes atrapados bajo los escombros en lugares de desastres, o posiblemente incluso la exploración de la superficie de otros planetas.
Su cuerpo modular está formado por una fila de segmentos unidos magnéticamente. Estos segmentos pueden separarse unos de otros y moverse como un «enjambre» colaborativo si es necesario. Sin embargo, para la mayoría de las aplicaciones, permanecerían unidos en forma de oruga.
La piel de PET (tereftalato de polietileno) de cada segmento cilíndrico presenta un patrón de plegado de origami tipo Kresling. En pocas palabras, este patrón consta de múltiples pliegues diagonales que permiten que el segmento se gire hacia abajo hasta formar un disco plano y luego se expanda nuevamente hasta adoptar la forma de un cilindro.
A lo largo de cada línea de pliegue hay finas «tiras de control» de elastómero de cristal líquido y poliimida, ambas recubiertas por una tira de nanocables de plata conectados a una fuente de energía. La aplicación de una corriente eléctrica a esa red de nanocables hace que se caliente, lo que a su vez calienta las tiras de control.
La tira de elastómero de cristal líquido responde al calor encogiéndose, mientras que la tira de poliimida responde simultáneamente expandiéndose. Esta reacción asimétrica combinada a lo largo de las líneas de pliegue hace que el segmento se tuerza formando un disco. Cuando se corta la corriente eléctrica, el segmento se expande nuevamente hasta formar un cilindro. Al activar secuencialmente todos los segmentos de esta manera, es posible mover el robot hacia adelante o hacia atrás.
Dicho esto, la tira «calentadora» de nanocables poder activarse sólo en un lado de un segmento. Esto hace que el segmento se contraiga sólo en ese lado. Si se activan de esta manera varios segmentos adyacentes, el cuerpo del Robotopilar se curva (y se mueve) en esa dirección. Los científicos ahora están trabajando para aumentar la velocidad del robot y mejorar su dirección.
Recientemente se publicó en la revista un artículo sobre la investigación, dirigida por el investigador postdoctoral de Princeton, Tuo Zhao. PNAS.
Fuente: Universidad de Princeton