Si los buceadores utilizan chalecos inflables (dispositivos de control de flotabilidad), ¿por qué no los robots submarinos? Bueno, uno nuevo experimental. hacey se afirma que la tecnología es mucho más eficiente energéticamente que los métodos tradicionales de subir y bajar en el agua.
Normalmente, los ROV (vehículos operados a distancia) submarinos y los AUV (vehículos submarinos autónomos) están diseñados para tener una flotabilidad neutra. Esto significa que ni se hunden hasta el fondo ni flotan hacia la superficie cuando están bajo el agua.
Para moverse verticalmente en la columna de agua, suelen utilizar sus potentes propulsores eléctricos. Otra opción es utilizar una bomba eléctrica para sacar y entrar agua de los tanques de lastre a bordo. En cualquier caso, se gasta una cantidad considerable de energía de la batería en el proceso.
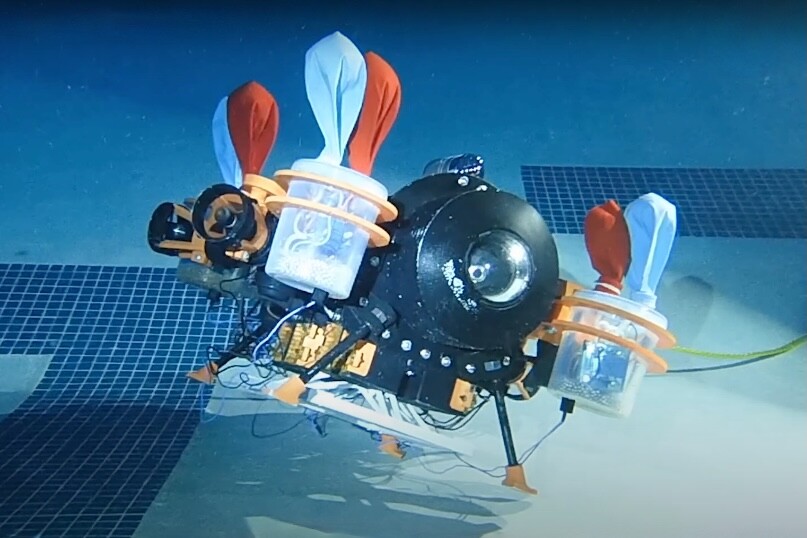
En busca de una alternativa más eficiente, el equipo BayMax de estudiantes de ingeniería de la Universidad Rice buscó celdas de combustible reversibles que dividieran el agua. Integraron cuatro de los dispositivos en un ROV que ellos mismos construyeron, llamado Monarch.
Las pilas de combustible que dividen el agua utilizan el proceso de electrólisis para dividir el agua líquida en sus dos componentes, hidrógeno y oxígeno gaseoso. Las células reversibles, como su nombre indica, también pueden convertir los dos gases nuevamente en líquidos. Debido a que los gases tienen una densidad menor que el líquido, tienen un volumen mayor.
Este fenómeno es explotado por el Monarca.
Jeff Fitlow/Universidad de Rice
Si el ROV necesita aumentar su flotabilidad, el agua líquida destilada de sus celdas de combustible se convierte en hidrógeno y oxígeno, que inflan globos ubicados en la parte superior de cada celda. Cuando el vehículo necesita disminuir la flotabilidad, esos gases se convierten nuevamente en líquidos, lo que hace que los globos se desinflen.
La tecnología también se puede utilizar para mantener la embarcación nivelada horizontalmente en el agua, activando automáticamente celdas individuales según sea necesario. Es más, debido a que la flotabilidad incluso de los ROV y AUV con flotabilidad «neutra» cambia a diferentes profundidades, o en agua dulce versus agua salada, el sistema se puede configurar para mantener el vehículo a cualquier profundidad determinada.
Si bien el proceso de electrólisis utiliza alguno electricidad, necesita considerablemente menos de la que se necesitaría para subir o bajar usando propulsores. La electricidad producida por las pilas de combustible podría incluso utilizarse para ayudar a alimentar el ROV.
De hecho, en un artículo de 2023 que inspiró al equipo de BayMax a crear el Monarch, científicos de la Universidad Rice y la Universidad de Houston afirmaron que el control de profundidad habilitado por celdas de combustible podría reducir el consumo de energía de los AUV hasta en un 85% en comparación con propulsores tradicionales.
Y lo que es más, se afirma que las pilas de combustible son más ligeras y menos costosas que los propulsores verticales. También son mucho más silenciosos, por lo que es menos probable que asusten a la vida silvestre submarina.
Jeff Fitlow/Universidad de Rice
No hace falta decir que, en aplicaciones del mundo real, se podrían utilizar vejigas considerablemente más fuertes en lugar de los globos de goma. De hecho, es posible que la tecnología base también pueda encontrar uso en aplicaciones no acuáticas, como dispositivos de asistencia portátiles o prendas robóticas.
«Lo bueno de esto para nosotros es que es una tecnología realmente de vanguardia, es algo que no se ha hecho antes exactamente de la forma en que lo estamos haciendo», dice Andrew Bare, miembro de BayMax. «Somos los primeros en implementar esta tecnología en un dispositivo con cabeceo y amplios controles, por lo que estamos muy entusiasmados con eso».
Puedes ver al Monarca en acción en el siguiente vídeo.
El proyecto es parte de un proyecto de colaboración entre los laboratorios de los profesores Fathi Ghorbel y Laura Schaefer de la Universidad Rice, y el profesor Zheng Chen de la Universidad de Houston.
Un robot submarino es pionero en un nuevo control de flotabilidad energéticamente eficiente
Fuente: Universidad de arroz