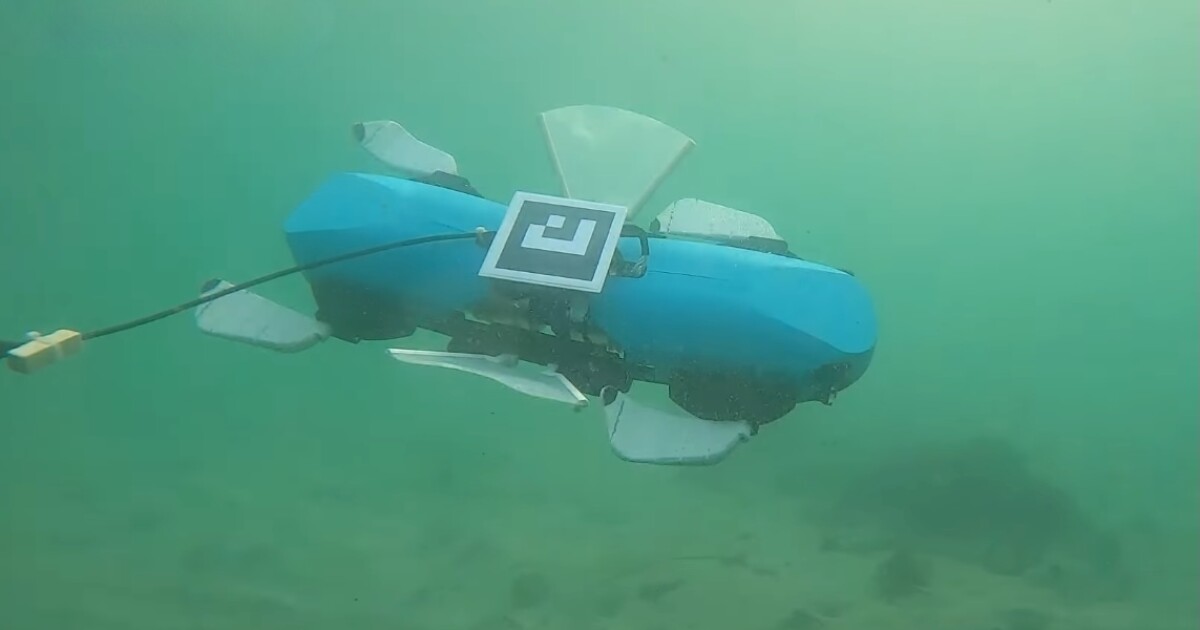
Un nuevo robot submarino puede nadar en el agua con aletas y caminar o gatear por el fondo cuando sea necesario. Estas capacidades realmente podrían darle una ventaja (juego de palabras totalmente intencionado) para superar a sus contrapartes tradicionales propulsadas por propulsores.
Cuando se trata de tareas como explorar barcos hundidos e inspeccionar estructuras sumergidas, se utilizan con frecuencia ROV (vehículos operados a distancia) submarinos.
Al igual que los sumergibles con tripulación, estos vehículos utilizan propulsores eléctricos para moverse por el agua. Desafortunadamente, sin embargo, esos propulsores pueden atascarse con algas, cables colgantes, hilo de pescar desechado u otro material. Además, los ROV no pueden avanzar contra corrientes que fluyen más rápido que la velocidad máxima de avance de los propulsores.
Ahí es donde se pretende que entre HERO-BLUE.
Su nombre es un acrónimo de «RObot para entornos extremos y peligrosos para una expedición submarina basada en multilocomoción biomimética», el dispositivo experimental fue creado por Taesik Kim y sus colegas de la Universidad de Ciencia y Tecnología de Pohang de Corea del Sur. Definitivamente recuerda a las universidades McGill y Dalhousie. AGUA robot, que utiliza seis aletas para nadar y «aletear» a través de tierra firme.

ACTITUD
El cuerpo de HERO-BLUE presenta cuatro aletas multimodales (dos al frente, dos atrás) junto con dos aletas laterales (una a cada lado, en el medio del cuerpo).
Cada una de las aletas multimodales está formada por varios paneles de polímero que están unidos entre sí mediante «tendones» de elastómero. Están construidos de tal manera que la aleta permanecerá rígida cuando se aplique fuerza en una dirección, pero se volverá flexible cuando se aplique fuerza en la otra dirección.
Cada una de las aletas laterales consiste en una membrana de elastómero suspendida entre dos «rayos» rígidos (básicamente varillas), uno en cada extremo de la membrana.
Cuando BLUE nada, las aletas multimodales se mueven hacia arriba y hacia abajo, como las aletas pectorales de un pez. Las aletas laterales también pueden activarse según sea necesario para maniobras más finas, moviéndose de forma ondulante como el aleta inferior de un pez cuchillo.
Dicho esto, nadar puede no ser una opción en corrientes fuertes. En tales casos, BLUE utiliza sus controladores de flotabilidad integrados para caer al fondo y luego usa sus aletas multimodales para caminar sobre grava, arena u otro terreno submarino. Cada aleta permanece rígida cuando se tira del cuerpo del robot hacia adelante, luego se vuelve flexible cuando se vuelve a mover hacia adelante para dar el siguiente paso.

ACTITUD
Nadar también es imposible en aguas muy poco profundas, por lo que BLUE tiene una columna vertebral inspirada en una salamandra. Esa columna se flexiona hacia la izquierda y hacia la derecha en la articulación de la cintura entre las secciones delantera y trasera del cuerpo del robot. Este diseño permite al robot girar su cuerpo hacia adelante y hacia atrás, retorciéndose hacia adelante incluso contra una corriente relativamente fuerte.
En su forma actual de prueba de concepto, BLUE mide 80 cm de largo por 60 cm de ancho por 30 cm de alto (31,5 por 23,6 por 11,8 pulgadas) e inclina la balanza a 11,3 kg (24,9 libras). Y aunque por ahora se controla de forma remota, tiene dos módulos de cámara en el frente para visión estereoscópica, lo que algún día podría permitirle operar de forma autónoma.
Puedes ver a HERO-BLUE nadando y caminando por el fondo en el siguiente vídeo. Recientemente se publicó un artículo sobre la investigación en la revista Transacciones IEEE sobre robótica.
[HERO BLUE] T-RO: vídeo total