Un nuevo robot submarino experimental es muy prometedor para su uso en el mantenimiento de plataformas marinas de energía renovable. Debido a que tiene la capacidad de escalar superficies verticales bajo el agua (y pintarlas), se le conoce como cangrejo de río.
Ya sea que estén aprovechando la energía del viento, las corrientes de marea o las olas, las estructuras de energía marinas requieren inspección, mantenimiento y reparaciones regulares. Por lo general, se contrata a buzos para realizar los aspectos submarinos de estos trabajos, aunque utilizar dicho personal puede ser costoso y llevar mucho tiempo… por no mencionar el riesgo para los propios buzos.
Ahí es donde entra en juego el Crawfish. Desarrollado por científicos del grupo de investigación Fraunhofer Smart Ocean Technologies de Alemania, el dispositivo atado en realidad se compone de dos componentes vinculados.
Encima hay un disponible comercialmente AzulROV2 Vehículo operado a distancia fabricado por la empresa Blue Robotics, con sede en California. En la parte inferior hay una unidad de orugas que cuenta con cuatro ruedas de elastómero de accionamiento directo junto con una variedad de herramientas como una cámara, un cepillo y un cabezal especial de lectura de sensores.
Fraunhofer
Como el robot pesa sólo 22 kg (48,5 lb), dos o tres trabajadores humanos pueden bajarlo al agua, sin necesidad de grúa. Una vez que el dispositivo está bajo el agua, un operador en la superficie lo dirige de forma remota hacia la estructura utilizando la cámara y los propulsores del BlueROV2.
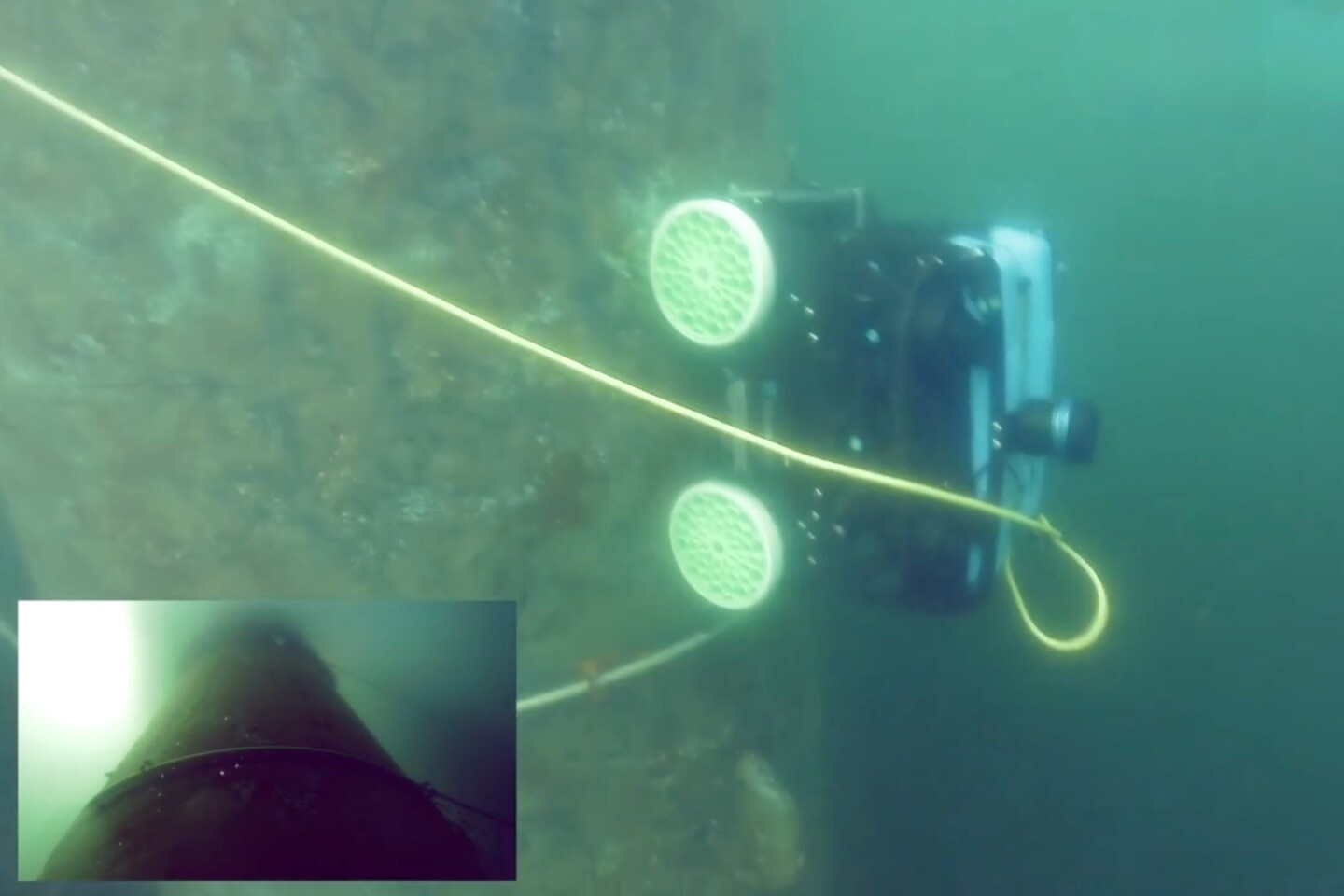
Al alcanzar la superficie vertical de la plataforma, los propulsores del BlueROV aplican hasta 90 Newtons (20 lb-fuerza/9 kg-fuerza) de fuerza «hacia abajo» (o fuerza horizontal, dependiendo de cómo se mire), manteniendo al Crawfish firmemente en su lugar. Luego, el robot avanza por la superficie utilizando sus ruedas motrices.
Mientras el robot lo hace, su cámara se utiliza para comprobar de forma remota si hay daños en la pintura anticorrosión de la estructura, mientras que su cabezal lector se utiliza para obtener datos de forma inalámbrica de los collares sensores CoMoBelt ubicados en varios puntos de la plataforma. Estos collarines fabricados por Fraunhofer detectan grietas en soldaduras mediante transceptores ultrasónicos integrados.
Si se detecta daño en la pintura, se puede reparar usando un material de recubrimiento de dos componentes que se inyecta en el cepillo operado de forma remota del robot. Las soldaduras defectuosas también podrían solucionarse utilizando un cabezal de soldadura integrado.
En su forma actual, el Crawfish puede descender a una profundidad máxima de 50 m (164 pies) y puede arrastrarse (usando 50 Newtons de carga aerodinámica) durante 25 minutos por carga de batería. Puedes verlo nadando libremente y trepando por estructuras en el siguiente vídeo.
Robot de plataforma de energía marina Fraunhofer Crawfish
Fuente: Fraunhofer