En una era de robótica cada vez más avanzada, un equipo realmente se ha opuesto a la tendencia y, en cambio, encontró inspiración en el cerebro del tamaño de la cabeza de un alfiler de un pequeño insecto volador para construir un robot que pueda evitar colisiones hábilmente con muy poco esfuerzo y gasto de energía. .
El diminuto cerebro de un insecto es una fuente poco probable de biomimetismo, pero investigadores de la Universidad de Groningen en los Países Bajos y la Universidad de Bielefeld en Alemania creían que era un sistema ideal para aplicarlo a la forma en que se mueven los robots. Moscas de la fruta (Drosophila melanogaster) poseen habilidades de navegación notablemente simples pero efectivas, usan muy poca capacidad intelectual para viajar rápidamente a lo largo de líneas rectas invisibles y luego se ajustan en consecuencia (volando en una línea en ángulo hacia la izquierda o hacia la derecha) para evitar obstáculos.
Con un cerebro tan pequeño, la mosca de la fruta tiene recursos computacionales limitados a su disposición durante el vuelo: un modelo biológico, creían los científicos, que podría adaptarse para su uso en el «cerebro» de un robot para operaciones eficientes y de baja energía. -evitar la locomoción.
«Como cuando estás en un tren», dijo la física Elisabetta Chicca, de la Universidad de Groningen. «Los árboles cercanos parecen moverse más rápido que las casas lejanas. Los insectos usan esta información para inferir qué tan lejos están las cosas.
«Lo que aprendemos de esto es que si no tienes suficientes recursos, puedes simplificar el problema con tu comportamiento», añadió.

En el cerebro de las moscas de la fruta, el movimiento de los objetos circundantes se procesa a través de las neuronas ópticas T4 y T5. Con la ayuda del neurobiólogo Martin Egelhaaf de la Universidad de Bielefeld, el equipo imitó algorítmicamente esta actividad neuronal en su pequeño «cerebro» robótico, dándole la capacidad de procesar información direccional para moverse de manera eficiente y evitar colisiones con cualquier obstáculo en su camino.
«Gran parte de la robótica no se preocupa por la eficiencia», afirmó Chicca. «Los humanos tendemos a aprender nuevas tareas a medida que crecemos, y dentro de la robótica, esto se refleja en la tendencia actual del aprendizaje automático. Pero los insectos pueden volar inmediatamente desde que nacen. Una forma eficiente de hacerlo está integrada en sus cerebros. «
El resultado final es un robot compacto con un objetivo principal: dirigirse hacia el área donde se detecte el menor movimiento. Thorben Schoepe, de la Universidad de Groningen, quien diseñó el hardware, sometió el robot con ruedas a una serie de pruebas y descubrió que se centraba entre los objetos y también ajustaba hábilmente su trayectoria para guiarse alrededor de los obstáculos, como lo haría un insecto en vuelo.
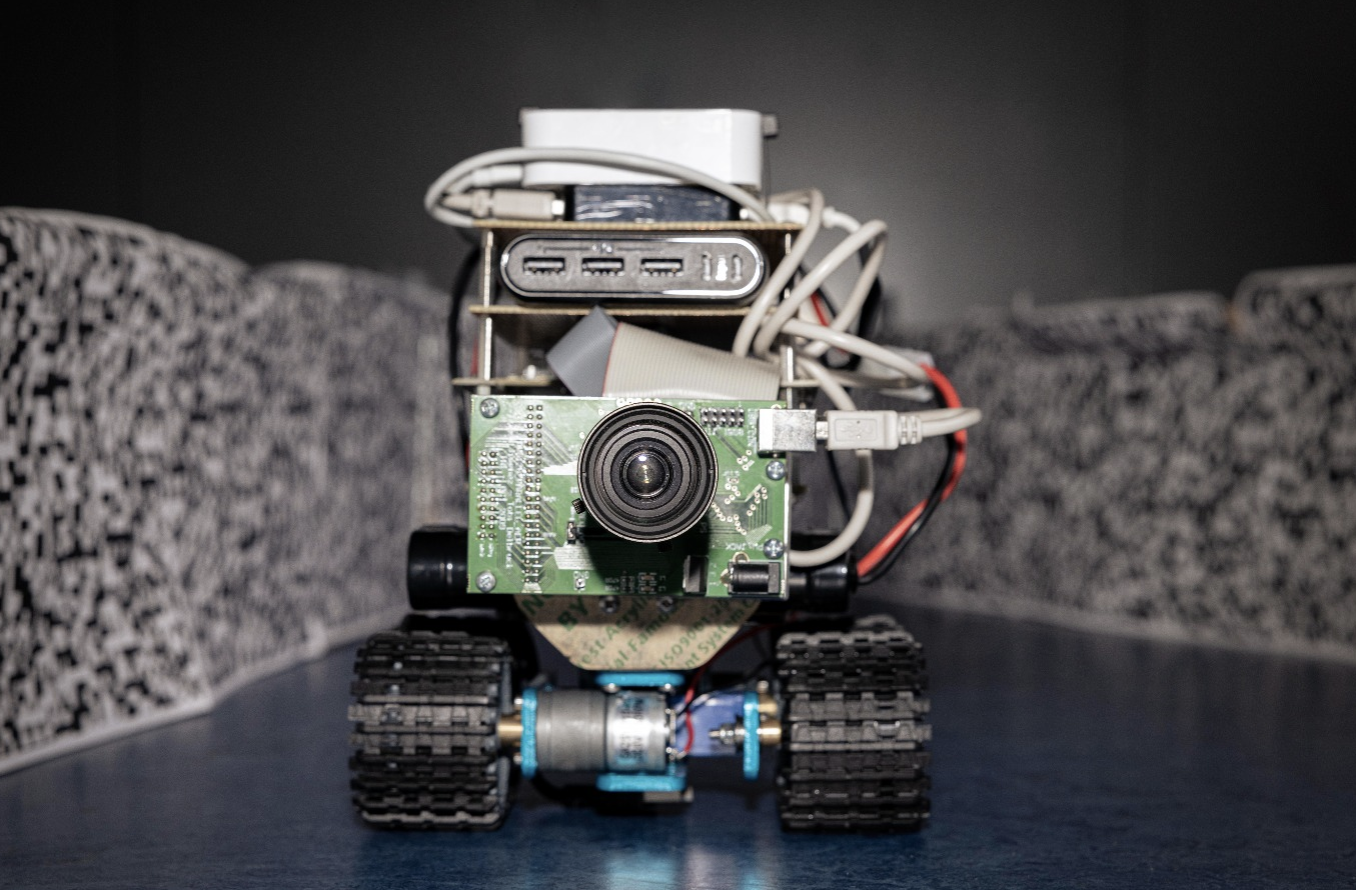
Leoni von Ristok/Universidad de Groningen
«El modelo es tan bueno», dijo Chicca, «que una vez configurado, funcionará en todo tipo de entornos. Ésa es la belleza de este resultado».
El equipo cree que este es el primer estudio de este tipo que se centra en la evitación de obstáculos y supone un gran paso adelante en el desarrollo de hardware neuromórfico en robótica. En el futuro, una máquina de este tipo podría usarse para navegar por terrenos abarrotados, como lugares de desastres, con una producción de energía extremadamente baja, y podría equiparse con diferentes tipos de sensores según el uso, como un radar para detectar objetos sin estructura.
«Desarrollamos un robot inspirado en los insectos», dijo Chicca. «Tiene capacidades notables para viajar en terreno denso, evitando colisiones, cruzando espacios y seleccionando pasajes seguros. Estas capacidades se logran mediante una red neuromórfica que dirige al robot hacia regiones de bajo movimiento aparente. Nuestro sistema aprovecha el conocimiento sobre el procesamiento de la visión y la evitación de obstáculos en insectos.»
La investigación fue publicada en la revista. Comunicaciones de la naturaleza.
Fuente: Universidad de Groninga