Probamos todas las aspiradoras tanto en pisos de madera como en alfombras.
Cómo probamos las aspiradoras robotizadas
Nuestro método para evaluar las aspiradoras robóticas es sencillo, pero agotador. Hay dos tipos de pruebas que realizamos. La primera prueba es descubrir qué tan bien un robot cubre el piso mientras se limpia. Construimos una sala de pruebas estándar de la industria según lo especificado por el Comisión Electrotécnica Internacional sólo para este propósito. La IEC es un organismo de normalización internacional responsable de gestionar los procedimientos de prueba de vacío de robots, entre otras cosas, para los fabricantes de vacío.

Saluda a nuestra sala de pruebas de robots aspiradores. En su interior hay objetos que pueden parecer un poco extraños. Están diseñados para simular muebles y obstáculos que encontrará un robot en el mundo real.
Dentro de esta sala hay objetos diseñados para simular los obstáculos típicos que encuentra un robot aspirador para navegar mientras limpia. Estos obstáculos incluyen bordes de paredes, patas de mesas y sillas, sofás y otros muebles, etc., además de baldosas desnudas y pisos de madera, así como alfombras. Montamos luces LED en la parte superior de cada aspiradora. Las dimensiones de las luces corresponden al ancho de boquilla medido de cada robot aspirador en particular que probamos.
Mientras los robots se mueven por la habitación mientras limpian, una cámara superior captura una imagen de larga exposición de toda la habitación con poca luz. Esa foto tendrá un rastro de luz, creado por los LED, que muestra las áreas exactas por donde viajó el robot (y la posición de su boquilla) durante su tiempo de ejecución. También podemos ver áreas del piso donde la aspiradora pudo haber fallado o quedado atascada. Puede ver los resultados de navegación de todos los robots aspiradores de nuestro grupo de prueba en la galería a continuación.
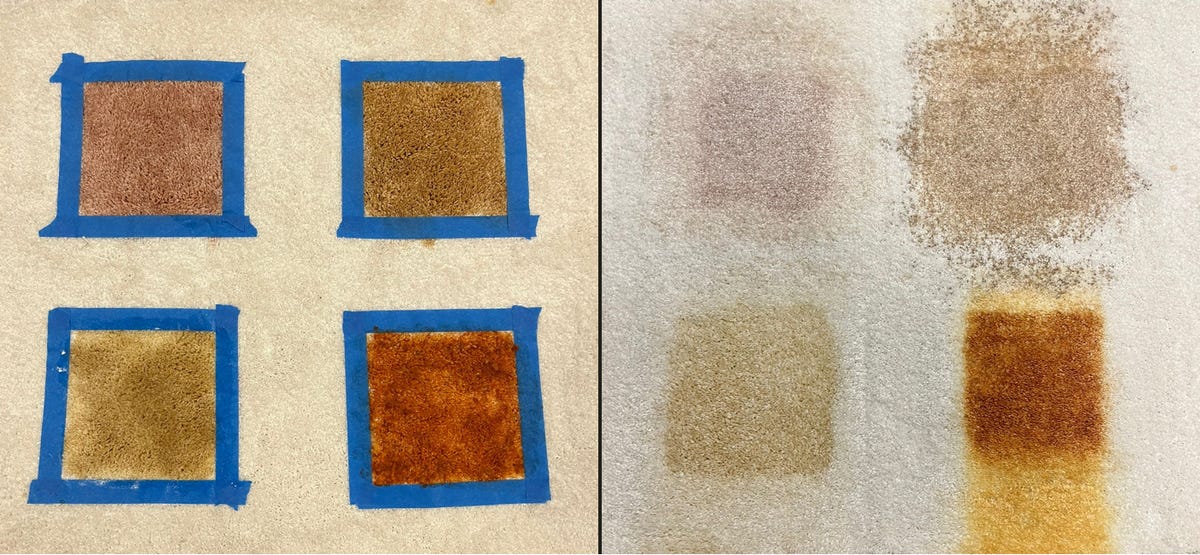
El segundo tipo de prueba revela exactamente cuántos desechos físicos puede recoger una aspiradora del suelo. Para imitar la suciedad de partículas pequeñas, utilizamos una mezcla de arena para juegos y arena para jardinería. Para suelos con partículas más grandes, utilizamos granos de arroz negro crudo. Luego, los robots funcionan en línea recta sobre tres tipos de pisos (alfombras de pelo corto, alfombras de pelo medio y suelos de madera).

Más de nuestra configuración de prueba de vacío robótico.
También controlamos el ancho de boquilla específico de cada aspiradora. Construimos una herramienta ajustable para ensuciar nuestros pisos de prueba. Nos permite colocar una franja de un área precisa de suelo para que coincida con las dimensiones de la boquilla de cada robot. La masa de suelo tampoco se elige al azar. Medimos una cantidad proporcional que está relacionada con el material del piso, el tipo de escombros y el ancho de la boquilla de cada aspiradora.
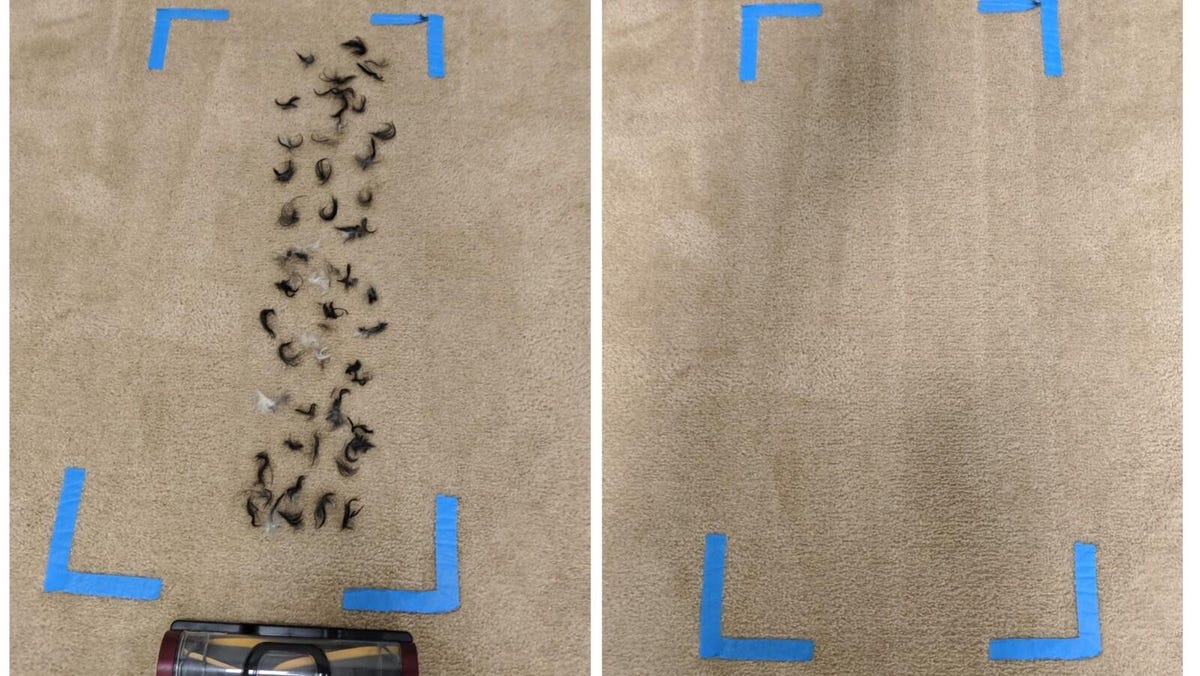
Realizamos tres ciclos de limpieza (como mínimo) en cada tipo de piso. También realizamos pruebas de limpieza con arena y arroz por separado. Eso equivale a al menos 18 pruebas por robot aspirador. Pesamos el contenedor de basura del robot antes y después de cada ejecución. A partir de ahí podemos calcular el porcentaje de recogida de residuos en cada limpieza y la cantidad media de suciedad que una máquina consigue eliminar. Además, realizamos pruebas anecdóticas (visuales) de pelo de mascotas para cada robot, en los tres tipos de piso.
Nuestra prueba de partículas de tamaño mediano a base de arroz no mostró suficiente diferenciación entre cada limpiador, lo que dice que todos pueden manejar partículas más grandes sin problemas. Para la eliminación del pelo de los dueños de mascotas, juzgamos de forma anecdótica.
Cómo probamos las aspiradoras inalámbricas
Realizamos pruebas en línea recta en los tres tipos de suelo.
Poner a prueba las aspiradoras inalámbricas no es tan complicado como probando un robot aspirador más limpia, pero aun así se necesita mucho tiempo y un esfuerzo cuidadoso para encontrar la mejor aspiradora inalámbrica. Pasamos cada aspiradora en línea recta sobre tres superficies diferentes (madera dura, alfombra de pelo corto, alfombra de pelo medio). En los tres bancos de pruebas, el área de prueba tiene la misma longitud (30,25 pulgadas).

Probamos la capacidad de una aspiradora para limpiar arena y arroz.
Al igual que en las pruebas de robots, el ancho del banco de pruebas es proporcional al ancho de la boquilla de la aspiradora. Medimos este ancho nosotros mismos. También utilizamos el ancho de la boquilla, más el tipo de piso, para calcular la densidad del suelo para cada prueba, según las pautas de IEC. Aquí también utilizamos los mismos tipos de suelo; arena, arroz y pelos de mascotas. Realizamos tres corridas (como mínimo) en cada tipo de piso. También probamos la potencia de succión con arena y arroz por separado. Eso equivale a al menos 18 pruebas por vacío. Pesamos el depósito de polvo de la aspiradora antes y después de cada ejecución.
A partir de ahí podemos calcular el porcentaje de suciedad y residuos recogidos en cada ejecución y la cantidad promedio de tierra que una aspiradora logra eliminar. Además, realizamos pruebas anecdóticas (visuales) de pelo de mascotas para cada aspiradora, en los tres tipos de piso, para ayudarnos a seleccionar la mejor aspiradora inalámbrica.