Un nuevo robot con ruedas es capaz de escalar estructuras metálicas de una manera muy inteligente y única: utiliza una cinta métrica extensible. Es posible que algún día los descendientes del robot encuentren utilidad para inspeccionar o incluso reparar cosas como torres, puentes, centrales eléctricas y barcos.
Aunque hemos visto otros robots que pueden subir por superficies metálicas verticales, la mayoría de ellos utilizan una combinación de sistemas de vacío y ruedaso piernas con pies magnéticos. Sin embargo, los primeros robots a menudo no pueden superar obstáculos relativamente pequeños, mientras que los segundos tienden a moverse lentamente y ser mecánicamente complejos.
Ahí es donde está diseñado para entrar en juego el EEWOC (Orbe con ruedas mejorado de alcance extendido para escalada). El robot experimental fue creado por Justin Quan, Mingzhang Zhu y Dennis Hong del Laboratorio de Robótica y Mecanismos de UCLA (RoMeLa).
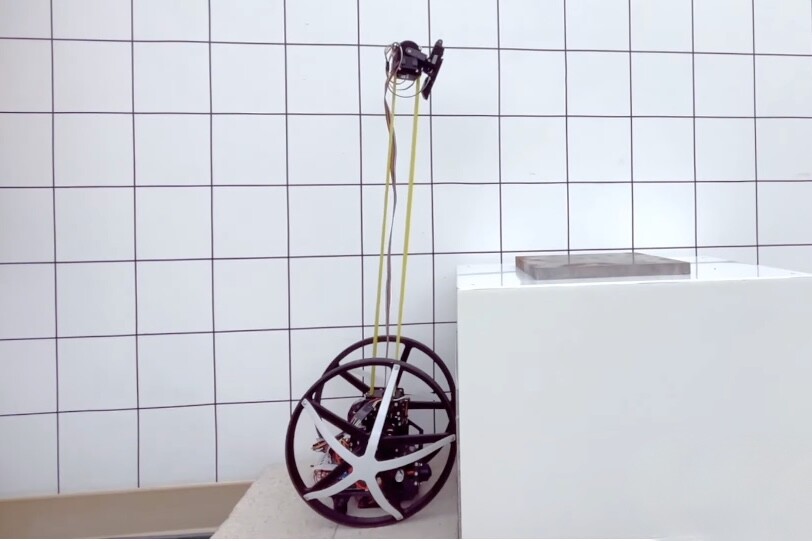
Cuando está en el suelo u otras superficies horizontales, el robot autoequilibrado rueda sobre sus dos ruedas. Sin embargo, una vez que llega el momento de comenzar a escalar, el EEWOC extiende verticalmente algo conocido como EEMMMa (Mecanismo de extensión elástica para movilidad y manipulación).
RomaLa
Esta extremidad incorpora un carrete motorizado de cinta métrica metálica ubicada dentro del cuerpo del robot. La cinta en sí se extiende hacia arriba fuera del robot, se dobla para formar una U invertida y luego vuelve a bajar para anclarse a la parte superior del robot.
En la curva de la U invertida, la cinta pasa sobre una polea dentro de una herramienta efectora final. Entre otras cosas, este El dispositivo incorpora un electroimán de ángulo ajustable montado en la parte superior.
Para la escalada recta, el EEMMMa comienza extendiendo su cinta. Al hacerlo, la extremidad se alarga (hasta un alcance máximo de 1,2 m/3,9 pies), y la herramienta de efector final siempre permanece en la curva en la parte superior. El imán de esa herramienta luego agarra el metal, después de lo cual el robot se levanta a la herramienta simplemente retrayendo la cinta hacia su carrete.
El robot tiene su propio imán en su parte inferior, que utiliza para permanecer en su lugar mientras el EEMMMa se suelta y se vuelve a extender para el siguiente tramo de la subida.

RomaLa
Para trepar y rodear repisas, el EEMMMa aún extiende su cinta, pero el efector final esencialmente aplica un freno, evitando que la cinta se mueva a través de ella. Esto hace que la cinta se amontone y se doble en ángulo recto, permitiendo que el imán alcance su objetivo que de otro modo sería inaccesible. Luego, el robot se acerca al imán y rueda sobre la repisa en el proceso. Este vídeo proporciona una explicación más detallada de cómo funciona la extremidad.
Nuevo miembro robótico de extensión y flexión EEMMMa – ASME JMR 2022 Descripción general de 2 minutos
En su forma actual, el EEWOC tiene un diámetro de 260 mm (10,2 pulgadas) y pesa sólo 2,1 kg (4,6 libras). El robot también tiene una velocidad máxima de ascenso de 0,24 metros por segundo (0,79 pies/s), lo que lo convierte en uno de los robots de ascenso más rápidos jamás creados.
Los planes futuros incluyen equipar el robot con múltiples EEMMMa que puedan extenderse en diferentes direcciones para lograr un movimiento omnidireccional. Los científicos también prevén utilizar pinzas EEMMMa no magnéticas que puedan agarrar superficies como árboles o paredes.
Puedes ver al robot en acción de escalada de metal, en el video a continuación; incluso se puede ver la cosa balanceándose a través de espacios horizontales, al estilo Indiana-Jones. Artículos tanto sobre el EEWOC y el EEMMMa se presentaron en las Conferencias Técnicas Internacionales de Ingeniería de Diseño y en la Conferencia de Computación e Información en Ingeniería ASME 2023, de nombre bastante largo.
Un robot trepador con una extremidad larga que se extiende y dobla con cinta métrica – EEWOC
Fuente: RomaLa a través de Espectro IEEE