
[ad_1]
Esta no es la primera vez que los científicos han mirado a los camarones Mantis como una inspiración para la robótica. En 2021informamos sobre un investigador de Harvard que desarrolló un modelo biomecánico para el poderoso apéndice de Mantis Shrimp y construyó un pequeño robot para imitar ese movimiento. Lo inusual en los camarones Mantis es que hay un retraso de un milisegundo entre cuando se produce el desaprendizaje y la acción de roto.
El equipo de Harvard identificó cuatro fases sorprendentes distintas y confirmó que es la geometría del mecanismo lo que produce la aceleración rápida después del desaprobado inicial por parte de los escleritos. El retraso corto puede ayudar a reducir el desgaste de los mecanismos de enganche sobre el uso repetido.
Nuevos tipos de movimiento
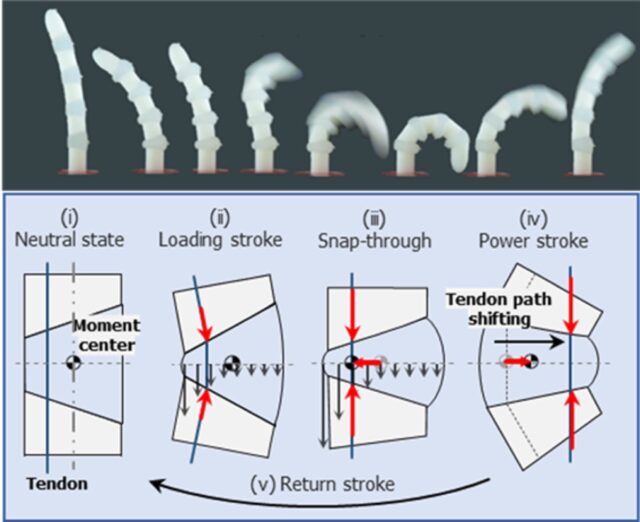
El principio de funcionamiento del mecanismo de inversión de torque hiperelástico (HETRM) implica comprimir una articulación elastomérica hasta que alcanza un punto crítico, donde la energía almacenada se libera instantáneamente.
Crédito: Science Robotics, 2025
El coautor Kyu-Jin Cho de la Universidad Nacional de Seúl se interesó en la robótica blanda como estudiante graduado, cuando participó en el Robosoft Grand Challenge. Parte de su investigación implicó probar la fuerza de los llamados «manipuladores robóticos blandos», un tipo que se usa a menudo en líneas de ensamblaje para soldar o pintar, por ejemplo. Se dio cuenta de algunas deformaciones involuntarias en la forma bajo la fuerza aplicada y se dio cuenta de que el mecanismo subyacente era similar a la forma en que los camarones de la mantis golpearon o cómo las pulgas logran saltar tan alto y muy lejos con su tamaño.
De hecho, Equipo de Cho Anteriormente construido un mecanismo de catapulta inspirado en pulgas Para los robots de salto en miniatura, utilizando el mecanismo de inversión de torque hiperelástico (HETRM) su laboratorio se desarrolló. La reversión de par de explotación generalmente implica la incorporación de componentes mecánicos complicados. Sin embargo, «me di cuenta de que aplicar [these] Los principios de la robótica suave podrían permitir la creación de nuevos tipos de movimiento sin mecanismos complejos «, Cho dijo.
Ahora se basa en ese trabajo para incorporar el HETRM en un brazo robótico suave que se basa en las propiedades del material en lugar del diseño estructural. Básicamente es un haz suave con segmentos hiperelásticos y rígidos alternativos.
«Nuestro robot está hecho de materiales suaves y elásticos, como el caucho», dijo Cho. «En el interior, tiene una parte especial que almacena energía y la libera de una vez, ¡BAM! Para hacer que el robot se mueva súper rápido. Funciona un poco como una rama de árbol doblada retrocede rápidamente o cómo una pulga salta muy lejos. Este robot puede agarrar cosas como una mano, arrastrarse por el piso o incluso saltar alto, y todo sucede simplemente tirando de un músculo simple «.
[ad_2]
Enlace fuente



