“Lo que entendíamos por eficiencia energética era calcular la entrada y la producción de energía. La energía producida fue la energía cinética y la energía potencial en el momento del despegue, definido como el momento en que los pies del robot dejan de tocar el suelo”, explica Shin. El aporte de energía se calculó midiendo la potencia utilizada durante el despegue.
“Resultó que el despegue con salto era en realidad la estrategia más eficiente desde el punto de vista energético. No esperaba ese resultado. Fue bastante sorprendente”, dice Shin.
El coste energético del despegue con salto fue ligeramente superior al de las otras dos estrategias, pero no mucho. Requirió un 7,9 por ciento más de energía que el despegue en pie y un 6,9 por ciento más que el despegue en caída. Al mismo tiempo, generó una aceleración mucho mayor, por lo que se obtuvo mucho mejor rendimiento (al menos en lo que a energía se refiere). En general, saltar con patas de pájaro fue 9,7 veces más eficiente que despegar de pie y 4,9 veces más eficiente que despegar en caída.
Una advertencia con los cálculos del equipo fue que un dron de ala fija con un diseño más convencional, uno que usara ruedas o un lanzador, sería mucho más eficiente en estrategias de despegue tradicionales que un robot RAVEN con patas. “Pero si lo piensas bien, los pájaros también volarían mucho mejor sin patas. Y, sin embargo, los necesitan para moverse por el suelo o cazar a sus presas. Se cambia parte de la eficiencia en vuelo por más funciones”, afirma Shin. Y las piernas ofrecían muchas funciones.
Obstáculos por delante
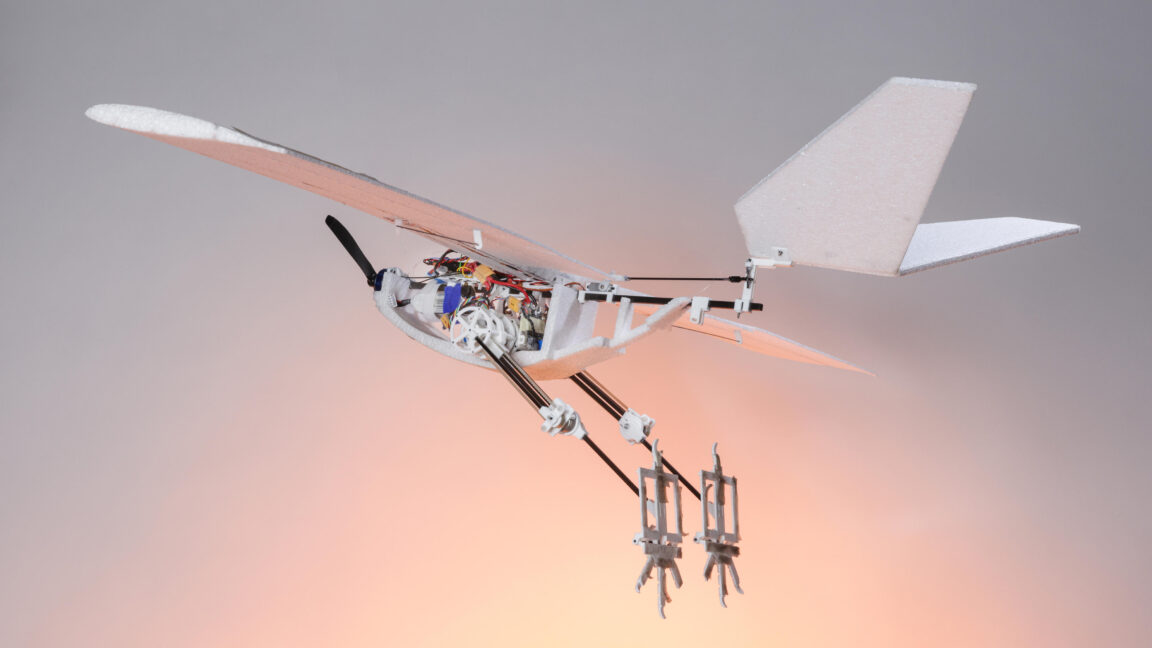
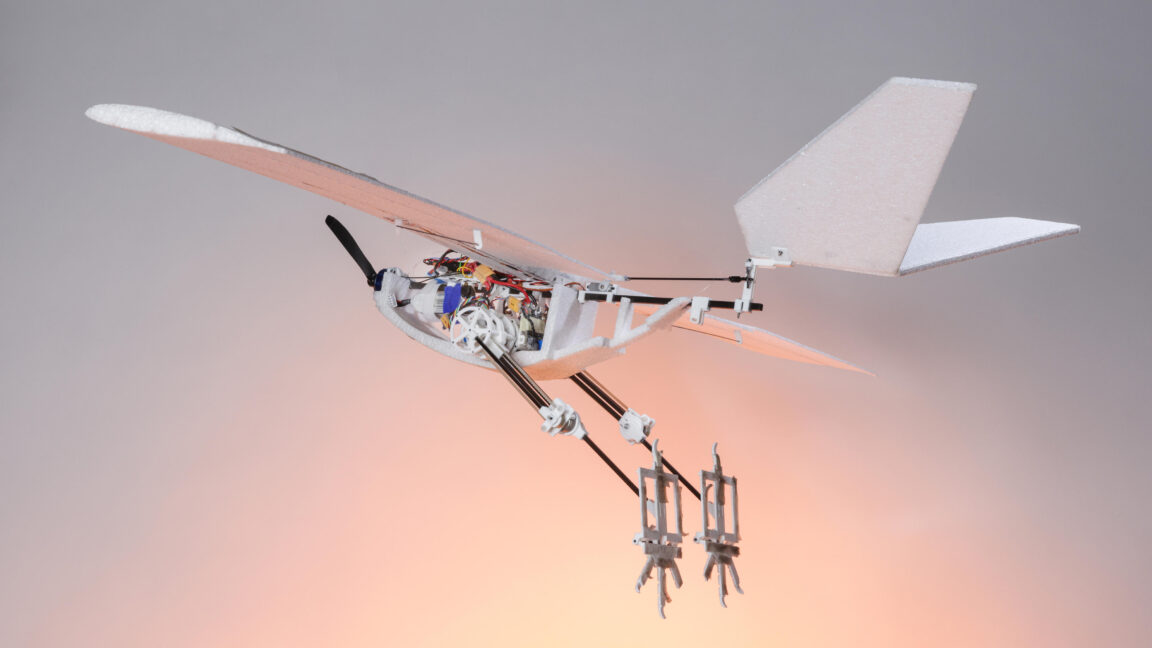
Para demostrar la versatilidad de su robot volador con patas, el equipo de Shin lo sometió a una serie de tareas que serían imposibles de completar con un dron estándar. El escenario de su misión de referencia implicaba atravesar un camino con un techo bajo, saltar un hueco y saltar sobre un obstáculo. «Asumiendo una posición erguida con la cola tocando el suelo, el robot podría caminar y permanecer estable incluso sin controladores avanzados», afirma Shin. Caminar resolvió el problema de moverse bajo techos bajos. Saltar huecos y obstáculos se realizó utilizando el mecanismo utilizado para el despegue: resortes de torsión y actuadores. RAVEN podría saltar un hueco de 11 centímetros de ancho y un obstáculo de 26 centímetros de alto.



